Eletrônica

Vestibulinho 2012

Balcão de Empregos

Não perca tempo!

Assistente Administrativo

Curso Recepcionista

Postagens populares
-
O pacote de Web Designer Compuway tem como objetivo fazer do aluno um profissional qualificado, ensinando técnicas para o desenvolv...
-
A Wikipedia diz que carreira é um “caminho estreito” ou “um espaço percorrido com velocidade”. Parece-me que a definição está muito pró...
-
 Este curso é voltado para pessoas que trabalham com procedimentos contábeis e interessados em matemática financeira. Como todas as pes...
Este curso é voltado para pessoas que trabalham com procedimentos contábeis e interessados em matemática financeira. Como todas as pes... -
 Dessa maneira, pode-se encaixar o webdesign dentro do design gráfico, uma vez que trabalha com a criação de projetos e desenvolvimento de...
Dessa maneira, pode-se encaixar o webdesign dentro do design gráfico, uma vez que trabalha com a criação de projetos e desenvolvimento de...



quarta-feira, 13 de junho de 2012
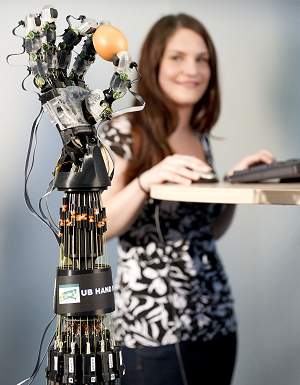
Mão robótica tem tendões artificiais similares aos humanos
 Mão boba
Mão bobaProgramar um robô para que ele pegue um jarro e coloque suco em um copo pode ser uma tarefa extenuante.
Uma das maiores dificuldades é que pegar um jarro cheio requer um nível de força e firmeza, enquanto pegar um copo de vidro vazio requer suavidade e cuidado.
Engenheiros da Universidade de Saarland, na Alemanha, acreditam que a saída é resolver a questão de uma vez por todas, passando a flexibilidade na manipulação dos objetos para o hardware da mão robótica.
Assim, os programadores poderão ficar livres para desenvolver aplicativos mais criativos, dando funções mais práticas aos robôs.
A miniaturização dos motores elétricos permitiu que os engenheiros simulassem a ação dos nervos da mão humana, usando-os para enrolar e desenrolar fios que controlam os dedos de forma independente e precisa.
Usando esses tendões artificiais, o resultado é uma mão robótica ao mesmo tempo forte e delicada, que dosa a força dependendo da tarefa a desempenhar.
Imitando a mão humana
"Queríamos dar à nossa mão robótica um amplo espectro de características humanas. Seus músculos artificiais devem ser capazes de dispensar grandes forças com técnicas simples e compactas," disse Chris May, coordenadora da equipe, que inclui pesquisadores de outras universidades europeias.
Pequenos motores de alta velocidade liberam e recolhem fios especiais de polímero, criando atuadores capazes de mover um objeto com até 5 quilogramas a 30 milímetros por segundo, sem as tradicionais "tremidas" dos braços robóticos.
"Cada dedo robótico, como um dedo humano, é formado de três segmentos, cada um controlado precisamente por tendões individuais," disse May. Cada tendão é formado por um fio de 20 centímetros.
A construção de mãos robóticas fortes, ágeis e hábeis é um dos
principais objetivos do projeto europeu Dexmart, que pretende construir
troncos robóticos com dois braços capazes de desempenhar tarefas
complexas.
Assinar:
Postar comentários (Atom)
0 comentários:
Postar um comentário